In den letzten Jahren hat sich die Bildgewinnung mittels WebCam und anderer digitaler (Video-)Kameras dramatisch verbessert. Die Auswirkung der Luftunruhe, die hier der Hauptfeind detailreicher Bilder ist, wird durch Mittelung sehr vieler Bilder drastisch verringert. Dadurch sind heute schon von Amateuren Bilder der Planeten und des Mondes möglich, die vor wenigen Jahren nicht einmal Großsternwarten von der Erde aus gelangen.
Phillips ToUCam Pro (PCVC 740K)
WebCam hoher Empfindlichkeit mit CCD-Sensor (bis 30 Bilder/s)
Techniken
Es gibt 2 Techniken:
 |
Mittelung vieler ausgewählter Bilder Dadurch erhält man ein sehr rauscharmes Bild, das im Kontrast mittels Unscharf-Maskierung sehr gut geschärft werden kann und viel Detail enthält. Dies ist die Technik der Wahl bei den Planeten- und Mond-Detail- und Sonnenbildern. |
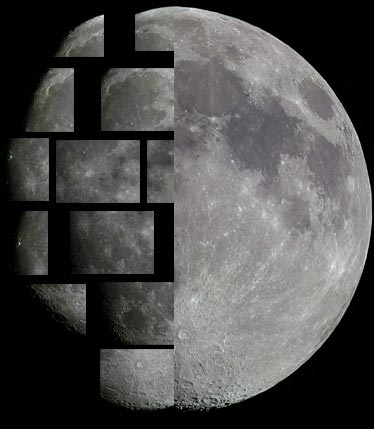 |
Komposit-Technik Zusammensetzen von großen Bildern aus mehreren Detail-Bildern. Hier erhält man sehr hohe Auflösungen des Fertigbildes. Das funktioniert ähnlich einem Puzzle, bei dem sich aber die Einzelbilder überlappen. Ich setze diese Technik bei Mond-Gesamt und einigen Sonnenfleckenbildern und inzwischen manchmal auch bei ausgedehnten DeepSky-Objekten ein. |
Bei beiden Techniken wird man unterstützt durch kostenlose Spezialsoftware, die sowohl die WebCams bei der Aufnahme ansteuert, die besten Bilder nach bestimmten Vorgaben aussucht (hier braucht man Fingerspitzengefühl ! ) als auch die Mittelung durchführt.
Ich verwende hier Registax und Giotto.
modifizierte WebCam zur DeepSky-Fotografie
Phillips Vesta SC (PCVC 675K)
WebCam hoher Empfindlichkeit mit CCD-Sensor (bis 25 Bilder/s)
Modifizierung nach Steve Chambers
Einige WebCams können nach einer Methode modifiziert werden, die ein Amateur-Astronom namens Steve Chambers entwickelt hat. (Daher stammt auch das Kürzel "SC")
Hierbei wird per Elektronik-Eingriff (Löten usw. habe ich lieber von jemandem machen lassen, der's kann) eine theoretisch unbegrenzte Belichtungszeit realisiert. Diese ist in der Praxis wegen der fehlenden Kühlung und den damit einhergehenden Bildverschlechterungen durch Erwärmung des Sensors und Verstärkers auf max. 120s begrenzt. Das ist aber wieder abhängig von der Umgebungstemperatur.
Die WebCam wird per USB an den Laptop angeschlossen, die Belichtungssteuerung erfolgt über den Parallel-Port.Das Preis-Leistungsverhältnis ist beeindruckend !
Für die Ansteuerung kommt bei mir die freie Software K3CCDTools zum Einsatz.
